Communication CAN fiable pour la conduite autonome
ADLINK Technology (calculateur ADM-AL30)
Communication CAN/CAN FD déterministe et tolérante aux pannes
PCAN-M.2 (4 canaux)
La problématique
La conduite autonome de niveau 4 exige une communication de données performante, déterministe et tolérante aux pannes entre de nombreux capteurs et calculateurs. L'intégrateur développant des navettes autonomes devait fusionner en temps réel les données de LiDAR, radar et caméras en environnement urbain complexe, prendre des décisions instantanées et dialoguer en toute sécurité avec les organes du véhicule.
Le calculateur central (ECU) nécessitait une liaison robuste, conforme aux normes et à faible latence vers la périphérie du véhicule via le bus CAN. Or les PC industriels n'offrent souvent pas de support natif pour CAN 2.0 et CAN FD, ni la compatibilité électromagnétique et la robustesse mécanique requises. La solution devait par ailleurs satisfaire aux certifications E-Mark (ECE R10) et aux normes ISO (ISO 7637-2, ISO 16750-2), dans un format compact intégrable directement dans l'ECU.
La solution
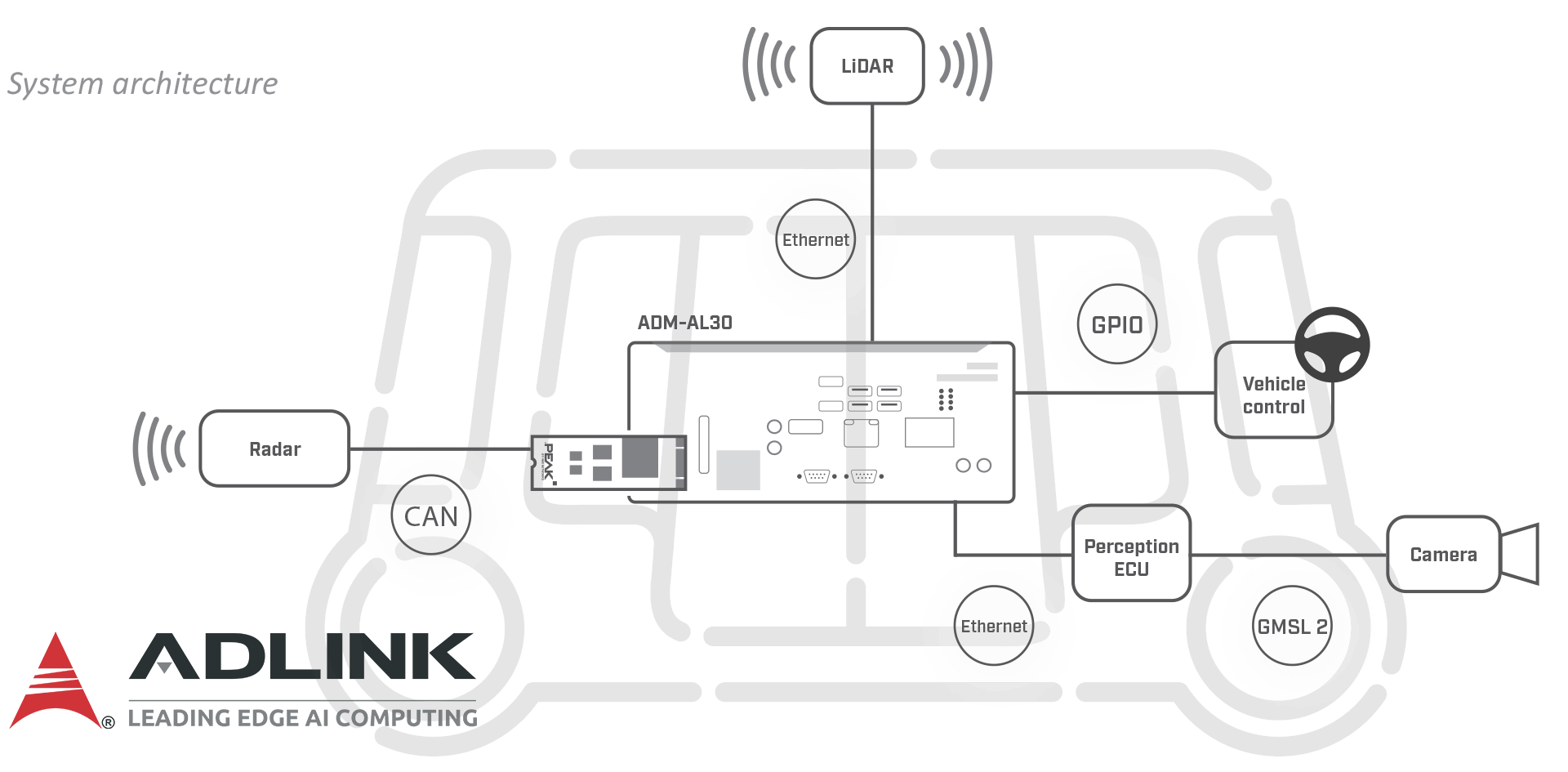
ADLINK Technology a intégré l'interface PCAN-M.2 à quatre canaux dans son calculateur ADM-AL30, qui associe un processeur Intel Core i9/i7 (12e génération) à un GPU NVIDIA RTX 4000 SFF, sous Ubuntu 22.04 avec ROS 2.0 ou Autoware.
1. Connectivité multi-canaux
Le PCAN-M.2 offre jusqu'à quatre canaux CAN indépendants, en CAN 2.0 A/B classique comme en CAN FD haut débit. Les données LiDAR transitent par Ethernet, les flux caméras par GMSL 2 vers un ECU de perception dédié, et les commandes de pilotage sont émises via les interfaces GPIO.
2. Format compact et robuste
Avec ses dimensions de 80 × 22 × 10,2 mm et sa connexion M.2 PCIe, la carte s'intègre dans un encombrement minimal et résiste aux vibrations — un atout décisif pour une intégration directe dans le calculateur embarqué.
3. Intégration logicielle native
La prise en charge native de SocketCAN sous Linux permet une intégration transparente dans les systèmes ROS 2.0 / Autoware, sans pilote propriétaire.
Le résultat
ADLINK dispose d'une communication véhicule fiable : quatre canaux assurent un transfert CAN/CAN FD stable, l'intégration logicielle se fait nativement via SocketCAN, et le format M.2 automotive-grade offre robustesse et forte immunité CEM. Le traitement multi-canaux parallèle soutient la fusion de capteurs et la prise de décision temps réel indispensables à la conduite autonome.
