Pilotage de robots de massage entièrement automatisés
ADLINK (plateforme IPC MVP-5100)
Communication CAN temps réel et sûre, au contact de l'humain
PCAN-M.2 (mono-canal)
La problématique
Pour le pilotage complexe de tables de massage équipées de bras robotisés, le fabricant taïwanais d'IPC ADLINK recherchait une interface de communication CAN robuste et facile à intégrer. Le système comporte trois PC industriels intégrés à la table, dont l'un est dédié exclusivement au pilotage précis des bras robotisés et des capteurs.
La mise en œuvre d'un robot de massage entièrement automatisé impose de fortes contraintes : la communication entre les multiples axes et les capteurs infrarouges doit être coordonnée en temps réel pour des mouvements fluides et précis. Le système de commande doit être robuste et à sécurité intégrée, puisque le robot opère en contact physique direct avec l'humain, dans des environnements professionnels et publics. Les systèmes devaient en outre satisfaire aux normes strictes du marché américain (classifications UL et FCC) et rester compatibles Linux pour une intégration logicielle fluide et une maintenabilité à long terme.
La solution
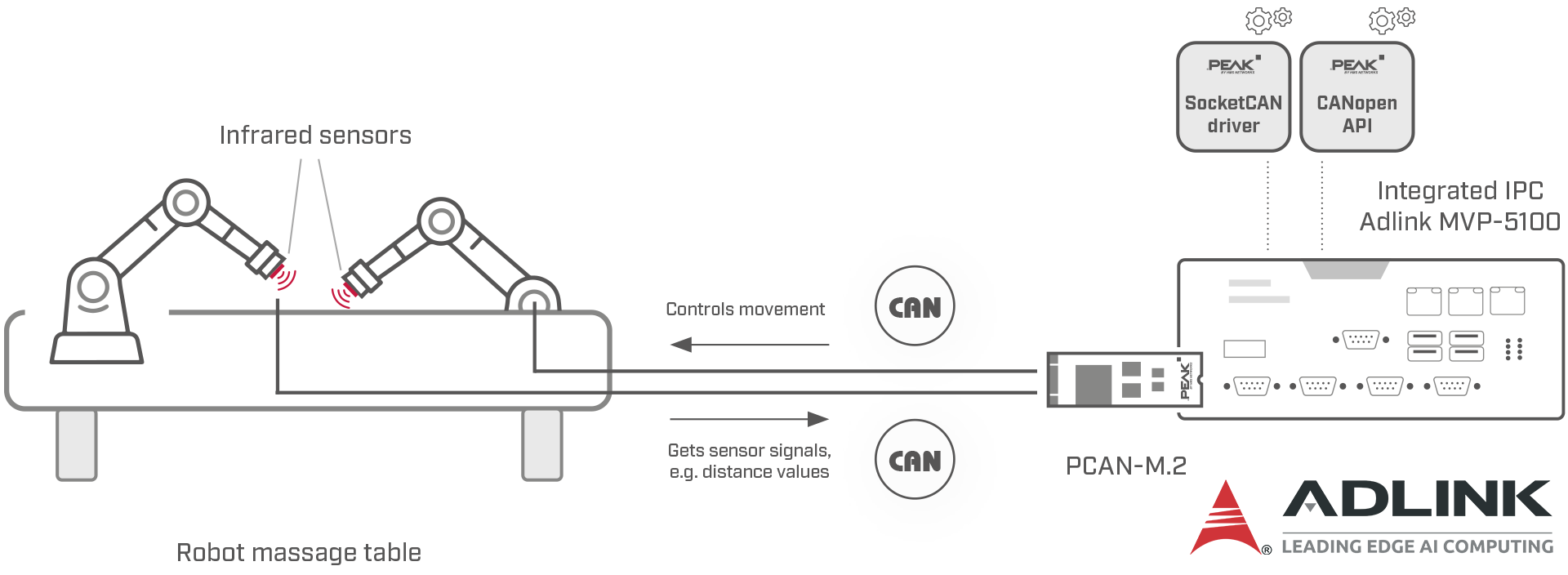
L'architecture repose sur trois PC industriels ADLINK MVP-5100, un par table. L'un d'eux embarque l'interface CAN et pilote les bras robotisés ainsi que les capteurs infrarouges et de position ; un deuxième, doté d'un GPU, gère le traitement d'image et l'analyse de mouvement ; le troisième assure les fonctions générales de commande et de diagnostic.
1. L'interface PCAN-M.2
Pour cette communication CAN sensible, ADLINK a retenu l'interface mono-canal PCAN-M.2. Carte enfichable compacte (80 × 22 × 46 mm), installée directement dans le boîtier de l'IPC via le slot M.2, elle prend en charge le CAN FD pour des débits élevés et une transmission stable.
2. Performances temps réel grâce au DMA
Un atout déterminant : la prise en charge du DMA (Direct Memory Access). Les données sont transférées directement entre le matériel et la mémoire principale sans solliciter le CPU, ce qui réduit la latence et améliore les performances globales. Associé à l'interface PCIe du PCAN-M.2, le DMA garantit un débit stable même dans les applications temps réel exigeantes.
3. Pilote SocketCAN et API CANopen
Côté logiciel, le système s'appuie sur le pilote SocketCAN, déjà intégré au noyau Linux standard, sans logiciel propriétaire additionnel. ADLINK utilise par ailleurs une API CANopen communautaire pour dialoguer avec les variateurs et capteurs : adressage des actionneurs du bras, lecture des états, pilotage des profils de mouvement.

« En combinant le pilote SocketCAN et l'API CANopen, on obtient un système ouvert et extensible, adaptable aux besoins futurs, tout en garantissant une communication stable, déterministe et à faible latence — cruciale pour le contrôle de mouvement temps réel du robot. »
Le résultat
Grâce au PCAN-M.2, ADLINK a déployé une solution de communication fiable et pérenne, parfaitement intégrée à la plateforme MVP-5100. Le support natif de Linux, la compatibilité CAN FD et la terminaison de bus activée ont fortement réduit l'effort d'intégration. Combiné aux PC industriels sans ventilateur d'ADLINK, l'ensemble offre une stabilité maximale, une maintenance minimale et une disponibilité à long terme.
